| ● | 技術名稱 Technology | |||||||||
| ● | 發明人 Inventor |
黃緒哲, 林淑怡, 何光翎, | ||||||||
| ● | 所有權人 Asignee | 國立台灣科技大學 | ||||||||
| ● |
|
|||||||||
| 點閱數:1892 | ||||||||||
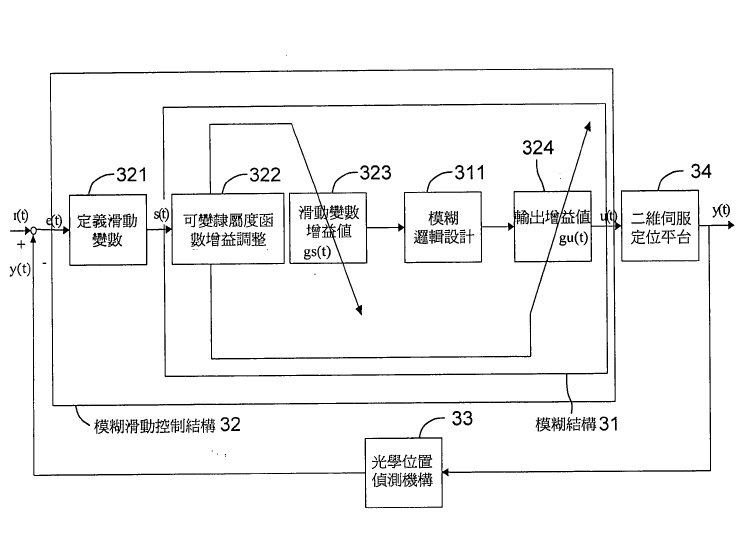
| 本發明採用創新式模糊邏輯結合增益自調滑動模式的控制方法,可將由偵測機構所得到之誤差訊號e(t)及代表誤差變化量之訊號ce(t)定義為滑動模式中之滑動變數s(t)=ce(t)+???e(t),並將之作為模糊輸入之控制變數。利用此控制方法,可將二維之模糊控制法則經由滑動模式定義之滑動變數簡化為一維之模糊控制法則,如此提升了在計算上之效率與節省了計算資源,以達到暫態快速反應與穩態精密定位之雙重目標,有別於習知控制器無法同時兼顧此雙重目標之缺點。 |
||||||||||||||||||||||||||||||||
| ||||||||||||||||||||||||||||||||
瀏覽人數:10493108
國立臺灣科技大學 產學處智財技轉中心 10607 台北市大安區基隆路 4 段 43 號 醫揚大樓 4 樓 TEL:02-2730-3244 或 02-2730-3727
2007~2024 © NTUST All Rights Reserved 著作權聲明
本系統採用 ![]() 專利行銷平台
專利行銷平台